【专利解密】商汤科技视觉导航方案 为解决智能交通导航问题发力
2021-12-03
 {{format_view(22571)}}
{{format_view(22571)}}
相关舆情
AI解读
生成海报


【嘉勤点评】商汤科技发明的视觉导航方案,通过预设视觉地图对移动终端拍摄的参考图像进行视觉定位得到第一位姿转换参数,并利用位姿转换参数对该信息进行转换得到第二位姿信息,有利于通过视觉定位减弱视觉里程计的累积误差,从而能够提高视觉导航精度。
集微网消息,视觉里程计技术(VO)是当前一些应用计算机视觉技术的场景的核心。例如,在视觉导航场景中,利用视觉里程计可以应用于室内导航、自动驾驶等许多领域中。
但是,由于视觉里程计本身作为一种局部的追踪技术,不可避免地存在累积误差,从而对视觉导航精度带来负面影响。
因此,为了获得高精度的视觉导航结果,商汤科技在2021年3月25日申请了一项名为“视觉导航方法及相关装置、移动终端、存储介质”的发明专利(申请号:202110320672.0),申请人为浙江商汤科技开发有限公司。
根据该专利目前公开的相关资料,让我们一起来看看这项技术方案吧。
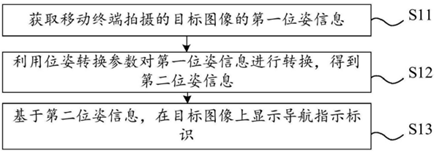
如上图,为该专利中申请的视觉导航方法的流程示意图,首先,由系统获取移动终端拍摄的目标图像的第一位姿信息,该信息是基于视觉里程计对目标图像进行处理得到,在计算机视觉领域中,视觉里程计是一种通过分析处理图像来确定位姿的技术,具体的位姿信息包括:x-y-z轴位置坐标、翻滚角、俯仰角以及偏航角等。
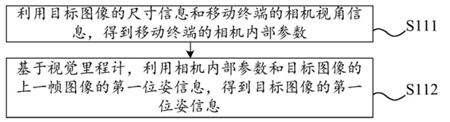
但是,在基于视觉里程计对目标图像进行处理得到第一位姿信息的过程中,无法直接获取到相机内部参数,例如,目标图像显示于移动终端的浏览器的界面内,即利用移动终端的浏览器实现视觉导航,在此情形下,可以通过上图所示的步骤,得到第一位姿信息:
首先,利用目标图像的尺寸信息和移动终端的相机视角信息,得到移动终端的相机内部参数,该相机视角信息是基于预设视觉地图对移动终端拍摄的参考图像进行视觉定位得到的。其次,基于视觉里程计,利用相机内部参数和目标图像的上一帧图像的第一位姿信息,就可以得到目标图像的第一位姿信息。
当得到第一位姿信息后,就可以利用位姿转换参数对第一位姿信息进行转换,得到第二位姿信息,位姿转换参数表示视觉里程计的坐标系与预设视觉地图的坐标系之间的转换关系,且位姿转换参数是基于预设视觉地图对移动终端拍摄的参考图像进行视觉定位得到的。
最后,基于所获得的第二位姿信息,可以实现在目标图像上显示导航指示标识,该方案中使用对用户比较友好的AR物体表示方案进行导航指示标识,例如左拐可以采用左拐箭头表示、右拐可以采用右拐箭头表示以及直行可以采用直线箭头表示等等。
以上就是商汤科技发明的视觉导航方案,该方案通过预设视觉地图对移动终端拍摄的参考图像进行视觉定位得到第一位姿转换参数,并利用位姿转换参数对第一位姿信息进行转换,进一步得到第二位姿信息,该位姿信息有利于通过视觉定位减弱视觉里程计的累积误差,从而能够提高视觉导航精度。
关于嘉勤

深圳市嘉勤知识产权代理有限公司由曾在华为等世界500强企业工作多年的知识产权专家、律师、专利代理人组成,熟悉中欧美知识产权法律理论和实务,在全球知识产权申请、布局、诉讼、许可谈判、交易、运营、标准专利协同创造、专利池建设、展会知识产权、跨境电商知识产权、知识产权海关保护等方面拥有丰富的经验。
(校对/holly)
责编:
刘燚
*此内容为集微网原创,著作权归集微网所有,爱集微,爱原创
 专利申请
专利申请
 知识产权质押融资
知识产权质押融资
 专利地图分析
专利地图分析
 版权登记
版权登记
 集成电路布图设计
集成电路布图设计
 商标交易
商标交易
 商标申请
商标申请
 专利交易
专利交易
 专利无效
专利无效
专利解密

上百家投资机构已确认参会!半导体投资联盟投后赋能大会报名持续中



热门评论