最小二乘法和梯度下降法有哪些区别?
21 个回答

为什么要比较这两种方法呢?很多人可能不知道,我先简单的介绍一下
机器学习有两种,一种是监督学习,另一种是非监督学习。监督学习就是我告诉计算机你把班上同学分个类,分类标准是按照性别,男生和女生;非监督分类就是告诉计算机你自己去把班上同学分个类吧,我不告诉你分类标准。
在监督学习中,如果我们面对的变量是连续型的变量就要用到回归

回归其实是非常容易理解,也非常实用的一种方法,很多经济类的学生在写论文的时候都会用到回归的方法。比方说,距离市中心的距离越近(距离为x),房价就越高(房价是y),可以得到一个y=kx+b的式子来大概的表示x和y之间的关系
不过,大部分的情况下是很多条件一起制约y的,不仅有离市中心的距离x₁,还有房子的新旧程度x₂等等条件,那么可以用到多元回归,一般式如下:
\hat{y}(\theta, x) = \theta_0 + \theta_1 x_1 + ... + \theta_p x_p
其中 \hat{y} 是预测值
\theta_0 \theta_1 ... \theta_p 是系数
x_0 x_1 ... x_p 是自变量
我们想要让这个方程拟合的非常好,那么就要使误差尽量小,评价误差小的方法就是所有误差的平方和最小
计算误差平方和最小的方法最常见的就是最小二乘法和梯度下降法

最小二乘法
最小二乘法是所有有数学思维的人面对这个问题第一想到的方法,最直接最不拐弯抹角的方法。就是求多元函数极值,这就是最小二乘法的思想!其实根本不用把最小二乘法想的多么高大上,不就是求极值嘛~
学过大学高等数学的人应该都知道求极值的方法:就是求偏导,然后使偏导为0,这就是最小二乘法整个的方法了,so easy啊~
∵e_i=y_i-\hat{y}\\ \hat{y}=(\theta, x) = \theta_0 + \theta_1 x_1 + ... + \theta_p x_p\\ ∴e_i=y_i-(\hat{\theta_0} + \hat{\theta_1} x_1 + ... + \hat{\theta_p} x_p)\\ Q=\Sigma_{i=1}^ne_i^2=\Sigma_{i=1}^n(y_i-(\hat{\theta_0} + \hat{\theta_1} x_1 + ... + \hat{\theta_p} x_p))^2\\
最后使所有的偏导等于0
\frac{\partial{Q}}{\partial{\hat{\theta_0}}}=0\\ \frac{\partial{Q}}{\partial{\hat{\theta_1}}}=0\\ \frac{\partial{Q}}{\partial{\hat{\theta_2}}}=0\\......
然后解这个方程组就可以得到各个系数的值了
梯度下降法
我们注意到最小二乘法最后一步要求p个方程组,是非常大的计算量,其实计算起来很难,因此我们就有了一种新的计算方法,就是梯度下降法,梯度下降法可以看作是 更简单的一种 求最小二乘法最后一步解方程 的方法
虽然只是针对最后一步的改变,不过为了计算简便,仍然要对前面的步骤做出一些改变:
recall上面的最小二乘法,我们有一个这样子的式子,就是所有误差的平方和:
Q=\Sigma_{i=1}^ne_i^2=\Sigma_{i=1}^n(y_i-\hat{ y }_i)^2
假设有m个数据,2个系数(θ₀和θ₁),我们要对最小二乘法的Q稍加改变,变成代价函数J,虽然用不同的字母表示了,但是他们的含义是一模一样的啦~
前面的1/2m系数只是为了后面求导的时候,那个平方一求导不是要乘一个2嘛,然后和1/2m的2抵消就没了,变成如下:
J(\theta_0, \theta_1) = \frac{ 1 }{ 2m } \displaystyle \sum_{ i = 1 }^{ m } (\hat{ y }_i - y_i)^2
然后θ₀和θ₁分别是这样子被计算出来的(其中:=为赋值的意思):
\theta_0:=\theta_0-\alpha\frac{\partial{J(\theta_0, \theta_1) }}{\partial{\theta_0}}\\ \theta_1:=\theta_1-\alpha\frac{\partial{J(\theta_0, \theta_1) }}{\partial{\theta_1}}
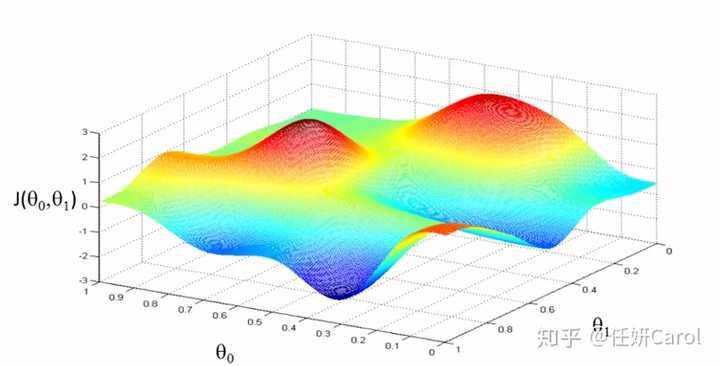
这个计算方法其实理解起来比较难,那么我们先来看看这个J函数的图像吧,J函数是关于θ₀和θ₁的函数,因此是三维的,为了使J的值最小,也就是高度最。相当于一个人要下山,下到海平面最低的地方,在图中就是蓝色部分,那就是最低的地方

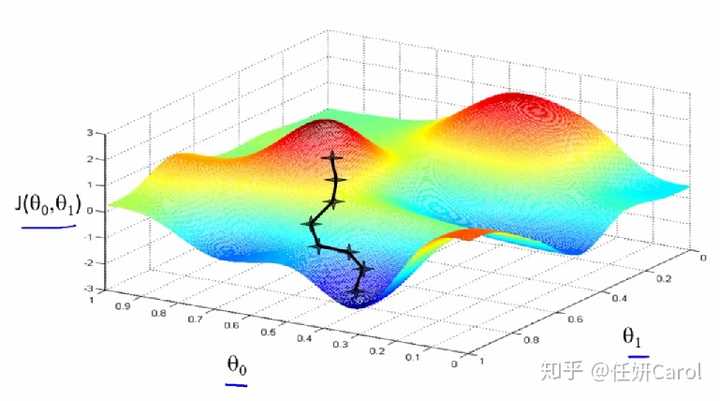
再想象这个人,要下到海平面最低的地方有很多条路啊,他可以绕着山头一圈一圈的下,像盘山公路一样(但没有人这样下山的,要走的距离也太长了8),最省力的方法就是按照梯度的方向下山,如图所示:
梯度:梯度是一个向量,梯度的方向就是最快下山,或者说沿着变化率最大的那个方向

我们再来看一下
\theta_0:=\theta_0-\alpha\frac{\partial{J(\theta_0, \theta_1) }}{\partial{\theta_0}}\\ \theta_1:=\theta_1-\alpha\frac{\partial{J(\theta_0, \theta_1) }}{\partial{\theta_1}}
这个一个反复迭代的式子,就是初始的时候,先找一个点(θ₀,θ₁)(可以随便找),然后在这个点沿着梯度下降的方向,即这个向量的方向
(\frac{\partial{J(\theta_0, \theta_1) }}{\partial{\theta_0}},\frac{\partial{J(\theta_0, \theta_1) }}{\partial{\theta_1}})
然后α的意思就是下山的跨步,比方说我知道了我接下来哪个方下是最快下山的方向了,我一步子跨多大,跨的小容易娘炮,跨的大容易扯着蛋(开玩笑),跨的小容易走了很多步才到山脚下,跨的大容易把最地点那个坑 给一下子跨过去,因此要确定合适的α
每跨一步,就到了一个新的点,然后在这个点的基础上继续跨步,直到下到最低点(此时再想走的话就是上坡了,即偏导为正了),这就是一个反复迭代的过程
完毕
如果你觉得写的很好不要吝惜赞哦
如果你想看其他的关于机器学习的一些知识,可以关注我的知乎专栏

同意
@张子权的说法, 稍微再补充一下. 看问题估计, 题主可能是在学 machine learning 的东西, 所以才会有此问题. 但正如其他人指出的, 其实两种方法并不太具有可比性. 不过我当时在学的时候也有类似的问题. 当时我的问题是, 最小二乘法的矩阵解法和梯度下降法的区别在哪里? 我估摸着题主可能是想问这个问题, 所以稍微回答一下. 如果我理解错了, 直接忽视下文即可.
其实, 在计算量方面, 两者有很大的不同, 因而在面对给定的问题时, 可以有选择性的根据问题的性质选择两种方法中的一个.
具体来说, 最小二乘法的矩阵公式是 (A^{T}A)^{-1}A^{T}b, 这里的 A 是一个矩阵, b 是一个向量. 如果有离散数据点, (x_{1}, y_{1}), ..., (x_{n}, y_{n}), 而想要拟合的方程又大致形如 a_{0} + a_{1}x^{1} + a_{2}x^{2}+...+a_{m}x^{m}, 那么, A 就是一个 n\times{}(m+1) 的矩阵, 第 i 行的数据点分别是 [x_i^0, x_i^1, ...,x_i^m], 而 b 则是一个向量, 其值为 [y_1, ..., y_n]^T. 而又已知, 计算一个矩阵的逆是相当耗费时间的, 而且求逆也会存在数值不稳定的情况 (比如对希尔伯特矩阵求逆就几乎是不可能的). 因而这样的计算方法有时不值得提倡.
相比之下, 梯度下降法虽然有一些弊端, 迭代的次数可能也比较高, 但是相对来说计算量并不是特别大. 而且, 在最小二乘法这个问题上, 收敛性有保证. 故在大数据量的时候, 反而是梯度下降法 (其实应该是其他一些更好的迭代方法) 更加值得被使用.
当然, 其实梯度下降法还有别的其他用处, 比如其他找极值问题. 另外, 牛顿法也是一种不错的方法, 迭代收敛速度快于梯度下降法, 只是计算代价也比较高. 题主有兴趣可以查阅相关资料